Robotics Platform
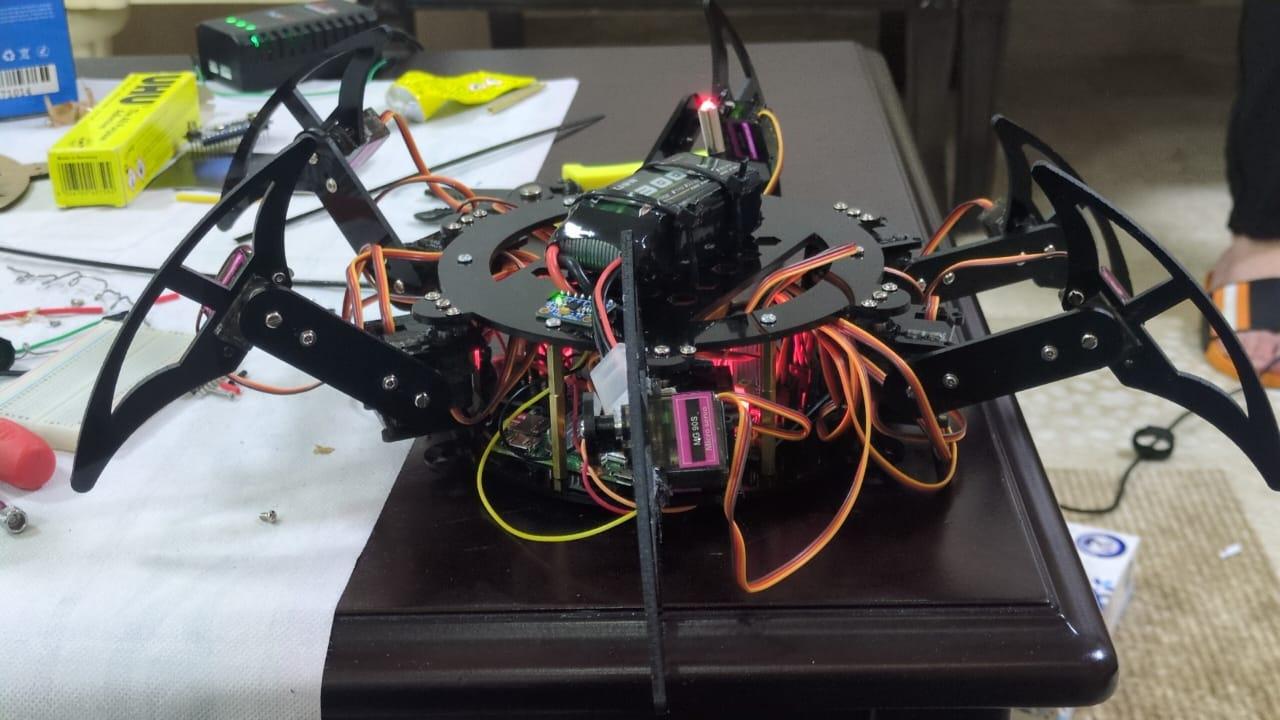
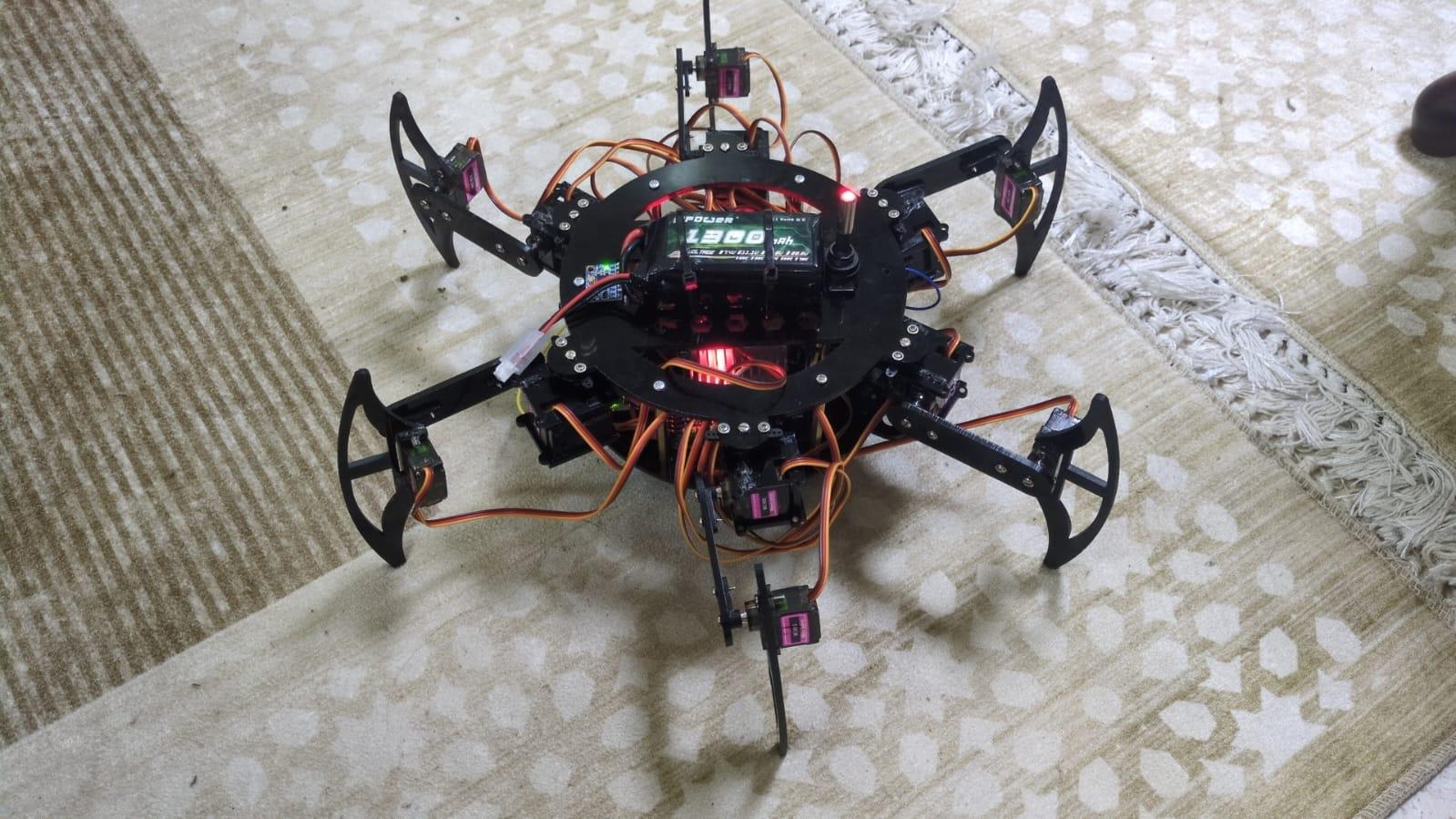
Hexapod Robot
Hexapod Robot
Advanced Platform
A six-legged autonomous robot utilizing coordinated tripod gaits and synchronized servo control for stable locomotion. Designed to explore hexapod movement dynamics and bio-inspired robotics principles.
18
DOF
Tripod
Gait Type
3
Team Size